Nvidia와 Alphabet의 Intrinsic, 차세대 로봇 공학의 미래를 변화시킬 준비 완료
Most people like
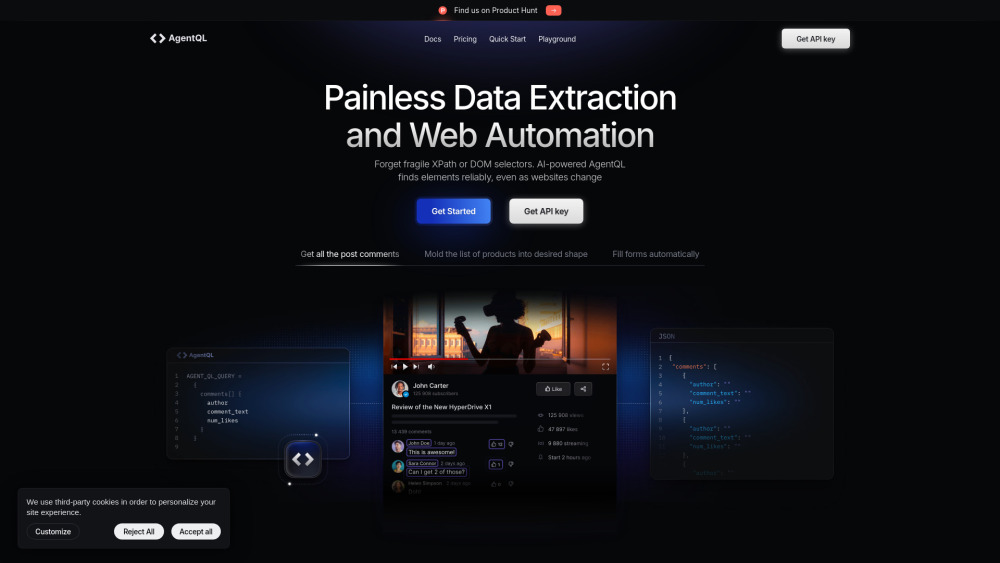
AI 기반 웹 자동화 및 데이터 추출 플랫폼을 소개합니다. 이 플랫폼은 귀하의 온라인 프로세스를 간소화하도록 설계되었습니다. 최첨단 솔루션은 인공지능을 활용하여 다양한 웹사이트에서 데이터를 효율적으로 수집하며, 기업이 반복적인 작업을 자동화하고 생산성을 향상시킬 수 있도록 지원합니다. 우리의 플랫폼이 어떻게 귀하의 운영을 혁신하고 웹에서 귀중한 통찰력을 손쉽게 얻을 수 있는지 알아보십시오.
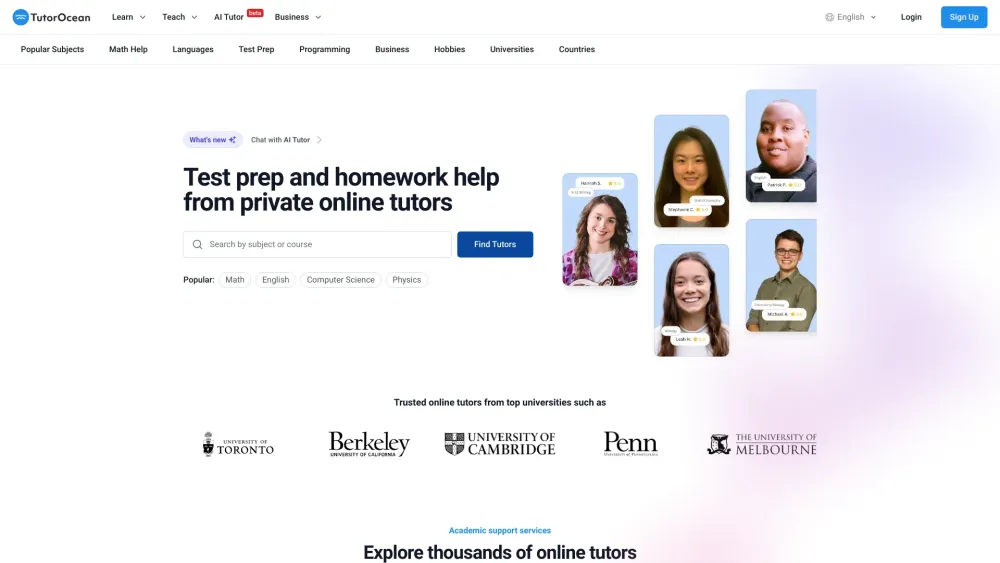
경제적인 개인 온라인 튜터링과 전문적인 숙제 도움을 만나보세요. 성적 향상이나 어려운 과목 이해를 원하신다면, 저희의 헌신적인 튜터들이 맞춤형 지원을 제공합니다. 오늘 편리한 온라인 학습으로 당신의 학업 잠재력을 발휘해보세요!

놀라운 고품질 비디오를 손쉽게 제작할 수 있는 AI 비디오 생성기로 여러분의 영상 콘텐츠를 혁신하세요. 마케팅 자료를 향상시키고자 하는 기업이든, 관객의 관심을 사로잡고자 하는 콘텐츠 제작자이든, 우리의 첨단 AI 기술이 비디오 제작을 간소화합니다. 혁신적인 비디오 생성 도구로 스토리텔링을 향상시키고 그 어느 때보다도 시청자를 사로잡는 방법을 발견해 보세요.

Find AI tools in YBX
