NVIDIA와 Apple Vision Pro가 협력하여 인간과 유사한 로봇을 개발합니다.
Most people like
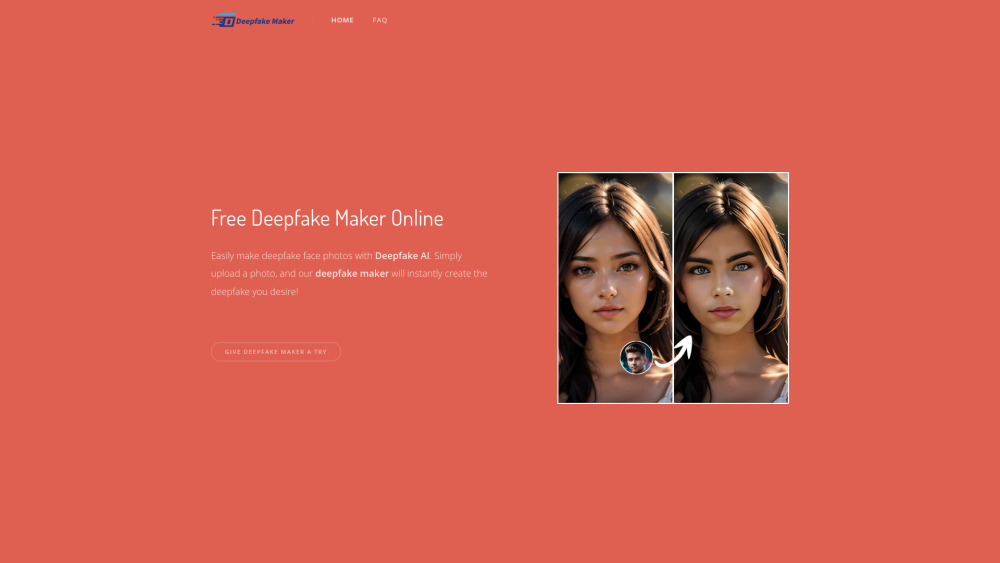
소개:
현실적이고 자연스러운 딥페이크 얼굴 교환을 손쉽게 구현할 수 있는 궁극적인 온라인 도구를 만나보세요. 영상 콘텐츠를 향상시키거나 매력적인 비주얼을 제작하거나 딥페이크 기술의 매력적인 세계를 탐험하고자 할 때, 우리 사용하기 쉬운 플랫폼은 얼굴을 매끄럽고 설득력 있게 교환할 수 있는 힘을 제공합니다. 오늘 바로 딥페이크 제작의 흥미로운 가능성에 빠져보세요!
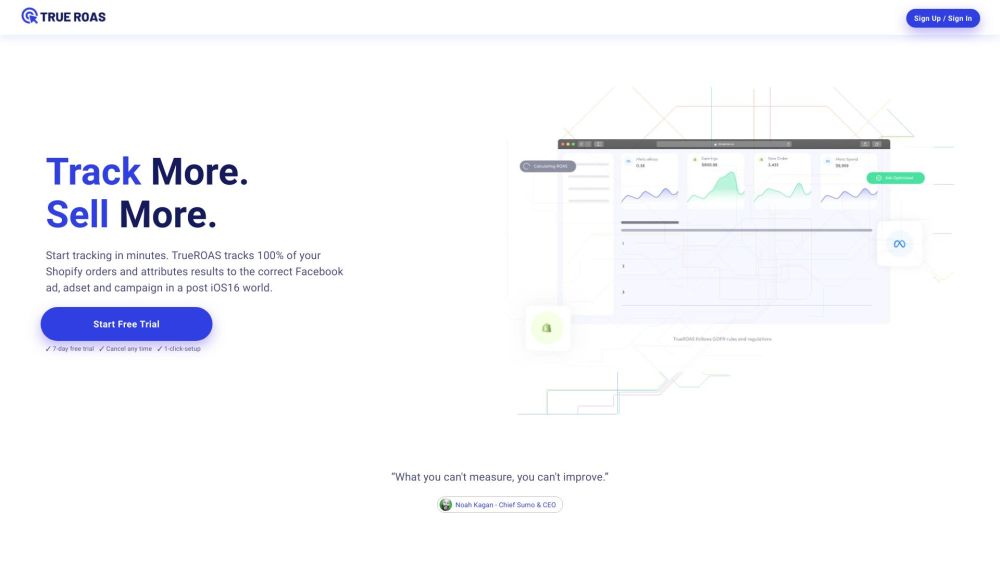
Shopify 주문에 대한 효과적인 광고 추적 및 기여는 마케팅 ROI를 극대화하는 데 필수적입니다. 정확한 추적 방법을 사용하면 고객 행동에 대한 귀중한 통찰력을 얻고 광고 전략을 최적화할 수 있습니다. 이 가이드는 Shopify 플랫폼에서 광고 성과를 정확하게 추적하는 모범 사례를 탐구하여 판매를 증가시키고 전반적인 비즈니스 성장에 기여하는 정보에 기반한 결정을 내릴 수 있도록 돕습니다.
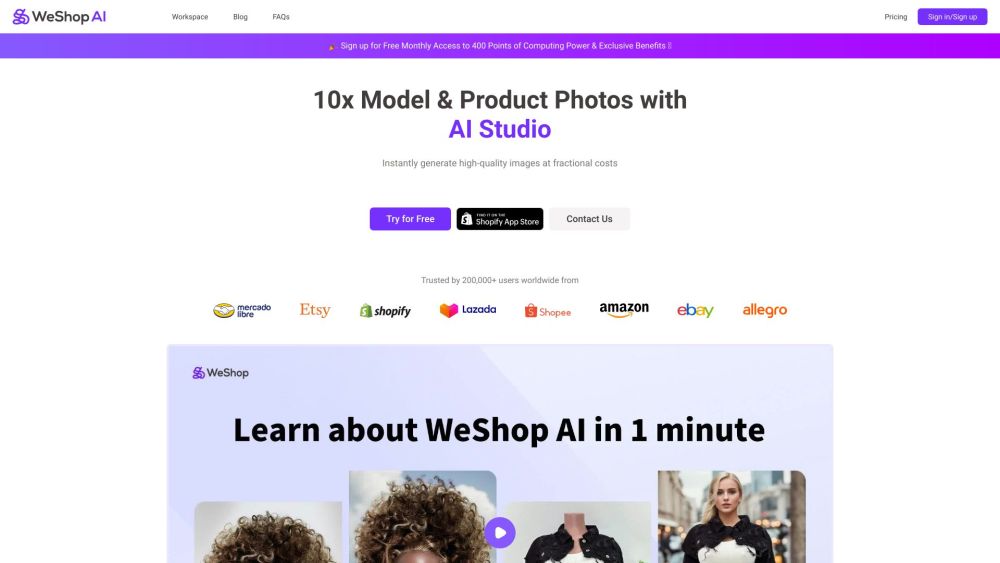
우리의 혁신적인 플랫폼을 활용하여 AI의 잠재력을 열어보세요. 멋진 고품질 이미지를 쉽게 생성할 수 있도록 설계되었습니다. 디자이너, 마케터 또는 매력적인 시각적 요소가 필요한 분이라면, 우리의 AI 기반 기술로 손쉽게 전문가 수준의 이미지를 만들 수 있습니다. 프로젝트를 단 몇 분 만에 향상시킬 수 있는 방법을 알아보세요!
Find AI tools in YBX
Related Articles
Refresh Articles